

Accueil Interface-Z - Produits - Publications - Conseils - Contacts - Liens
Séminaire du 11/06/05, Main d'Oeuvres, Saint-Ouen
Deuxième partie du cours
Aller à la première partie du cours
- Micro à électret
- Micro à bobine ou électrodynamique
Capteur à fort débit / temps réel
Types de micro : Micro omnidirectionnel / Micro directionnel / Portée
très variable
Prise d’ambiance sonore / restitution à
distance
Réaction à un son précis
=> Analyses, filtrages, enveloppe, traitements très divers
- Signal issu d’un micro
- Détection d’enveloppe avec un montage électronique adapté
Capteur + lent
Grande sensibilité au souffle et aux percussions.
Réglage possible pour ajuster la sensibilité à la voix
ou non.
=> Utilisations en PD très diverses :
utilisation de l'enveloppe d'une voix, déclenchement d'un événement
à partir d'un seuil, analyse d'un niveau sonore général,
...
Il s'agit d'une imitation de la chauve-souris. Nécessité d'une émission régulière d'ultrasons.


Exemple de transducteur à ultra-sons
Détection des obstacles : l'attente de l'écho est proportionnelle
à la distance.
Information : Distance du premier obstacle rencontré.
=> Reconstitution d'une mesure en PD par assemblage
de deux Control Change
=> Mesure de distance directe
=> Mesure de vitesse, détection de présence, détection
de mouvements par analyse des données de distance
- Cône de réceptivité
- Précision
- Portée (3 à 10 m)
- Matériaux réfléchissants / absorbants
- Interférences
- Parasitage (percussions métalliques, systèmes pneumatiques)
=> Filtrage en PD, lissage, utilisation de min / max,
médian
=> Analyse des données filtrées, pour en déduire le
comportement de l'utilisateur et décider comment gérer la suite
du patch
Capteurs sensibles à la présence et à la proximité
=> Traitement utile en PD :
limiter les multiples détections correspondant en fait à un seul
mouvement
Sensibilité à un mouvement de chaleur
Généralement associés à une lentille de Fresnel
Ne permet pas de détecter la présence immobile de personnes
- Détection de mouvement
- Détection de passage
- Capteur lent, saturé par la foule
=> Traitement en PD :
analyse du signal pour déterminer l'état stable en absence de
mouvement
=> Réduction du seuil du 8 ana !
Caractéristiques :
- Tout ou rien / proportionnel
- Détecteur de proximité
- Signal non linéaire
- Repliement du signal
=> Exemples de traitements de données en Pure-Data
:
Fonctionnement en barrière
Linéarisation des données


Proximètre requin-marteau
(signal variant selon la distance) et proximetre ET (signal tout ou rien)

Voltage envoyé par le capteur, en fonction de la distance.
Capteurs de lumière inra-rouge ou visible
Barrière double
=> Analyse de l'ordre de passage devant les faisceaux de lumière
Capteur sensible à la quantité de lumière reçue
Une variation de lumière provoque une variation de signal
Plusieurs types de capteurs
- Transistor - Commandes tout ou rien
- Optique - Détection de passage à longue distance
- Écran TV - Détection de mouvements en temps réel
=> En PD, détection de passage ou utilisation en « Theremin »
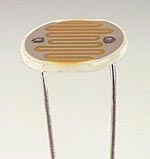

Exemple de capteurs LDR analogiques directives
